How to implement the iterative Newton–Raphson method to find roots of a function in Python
We often opt for the iterative methods for solving a number of problems in geosciences.
The goal of such an iterative scheme is to achieve convergence (for root finding or solving a system of linear equations) or divergence (applications using differential equations). In computer programming, we usually use a “for loop” to implement an iteration procedure.
Some the iterative methods I have covered so far are Monte Carlo methods and Genetic algorithm in the context of the earthquake location problem.
Key idea — slide down the tangent to land closer to the root. From a guess $x_n$, Newton–Raphson draws the tangent to the curve at that point and follows it to where it crosses zero — that crossing is the next guess $x_{n+1}$. Repeat, and (for a good starting guess) you rocket toward the root, roughly doubling the number of correct digits each step. The whole method is one line: $x_{n+1} = x_n - f(x_n)/f’(x_n)$ — with the one caveat that it breaks if the slope $f’(x_n)$ is zero, and can wander off from a poor initial guess.
What is the Newton–Raphson method?
The Newton–Raphson method (commonly known as Newton’s method) is developed for finding roots of a given function or polynomial iteratively.
Consider a non-linear equation, where we seek to find the root $x_r$
\[f(x_r) = 0\]The Newton–Raphson method is an iterative scheme that relies on an initial guess, $x_0$, for the value of the root. From the initial guess, subsequent guesses are obtained iteratively until the scheme either converges to the root $x_r$ or the scheme diverges and we seek another initial guess. The sequence of guesses are obtained from the slope of the function.
\[slope = \frac{df(x_n)}{dx}= \frac{0-f(x_n)}{x_{n+1}-x_n}\]This gives the Newton–Raphson iterative relation (Kutz, 2013):
\[x_{n+1} = x_n - \frac{f(x_n)}{f'(x_n)}\]Notice that in the above equation, the scheme fails if $f’(x_n) = 0$. In general, if the initial guess is sufficiently close to $x_r$, the scheme converges. See Burden and Faires (1997) for details on the conditions for convergence.
Python Example 1
Let us now implement Newton’s method for finding root of the problem:
\[f(x) = x^3 - 3x + 1 = 0\]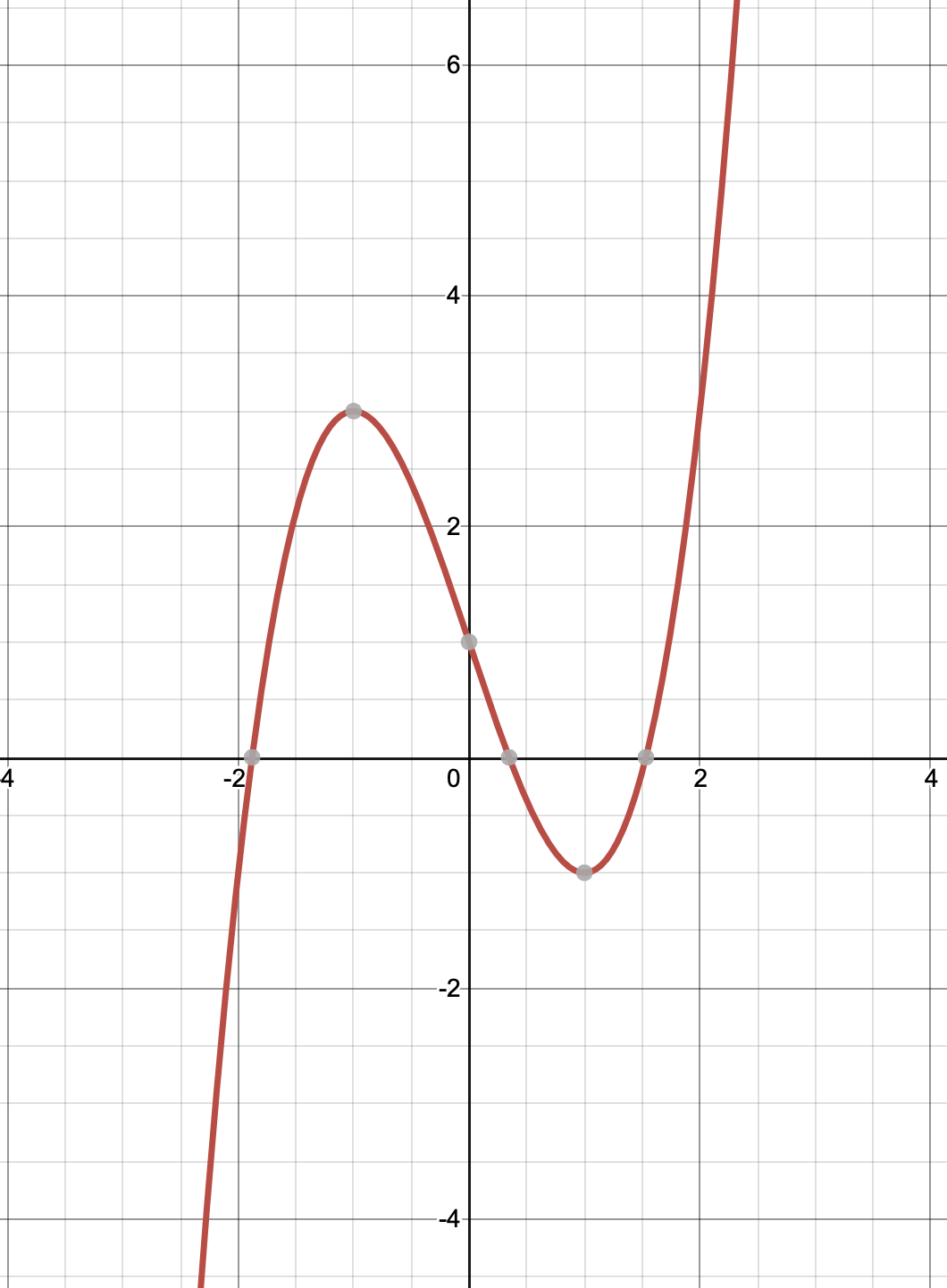
For this equation, we have $f(x) = x^3 - 3x + 1$ and $f’(x) = 3x^2 - 3$. Hence, the Newton’s formula becomes:
\[x_{n+1} = x_n - \frac{x^3 - 3x + 1}{3x^2 - 3}\]import numpy as np
import matplotlib.pyplot as plt
plt.style.use('seaborn')
x = np.zeros((1000, 1))
x[0] = 5.0 # initial guess
fig, ax = plt.subplots(1, 1)
for j in range(1000):
# x_{n+1} = x_n - \frac{x^3 - 3x + 1}{3x^2 - 3}
x[j+1] = x[j] - (x[j]**3 - 3*x[j] + 1)/(3*x[j]**2 - 3)
# f(x) = x^3 - 3x + 1
func = x[j+1]**3 - 3*x[j+1] + 1
ax.plot(x[j], func, 'o', color='b')
# termination criteria
if np.abs(func) < 10**-6:
break
plt.gca().invert_xaxis()
ax.set_xlabel('x')
ax.set_ylabel('f(x)')
plt.savefig('example1.png', dpi=300, bbox_inches='tight')
plt.close()
print(f"The root of the function is: {x[j+1]}")
print(f"Function value at the root: {func}")
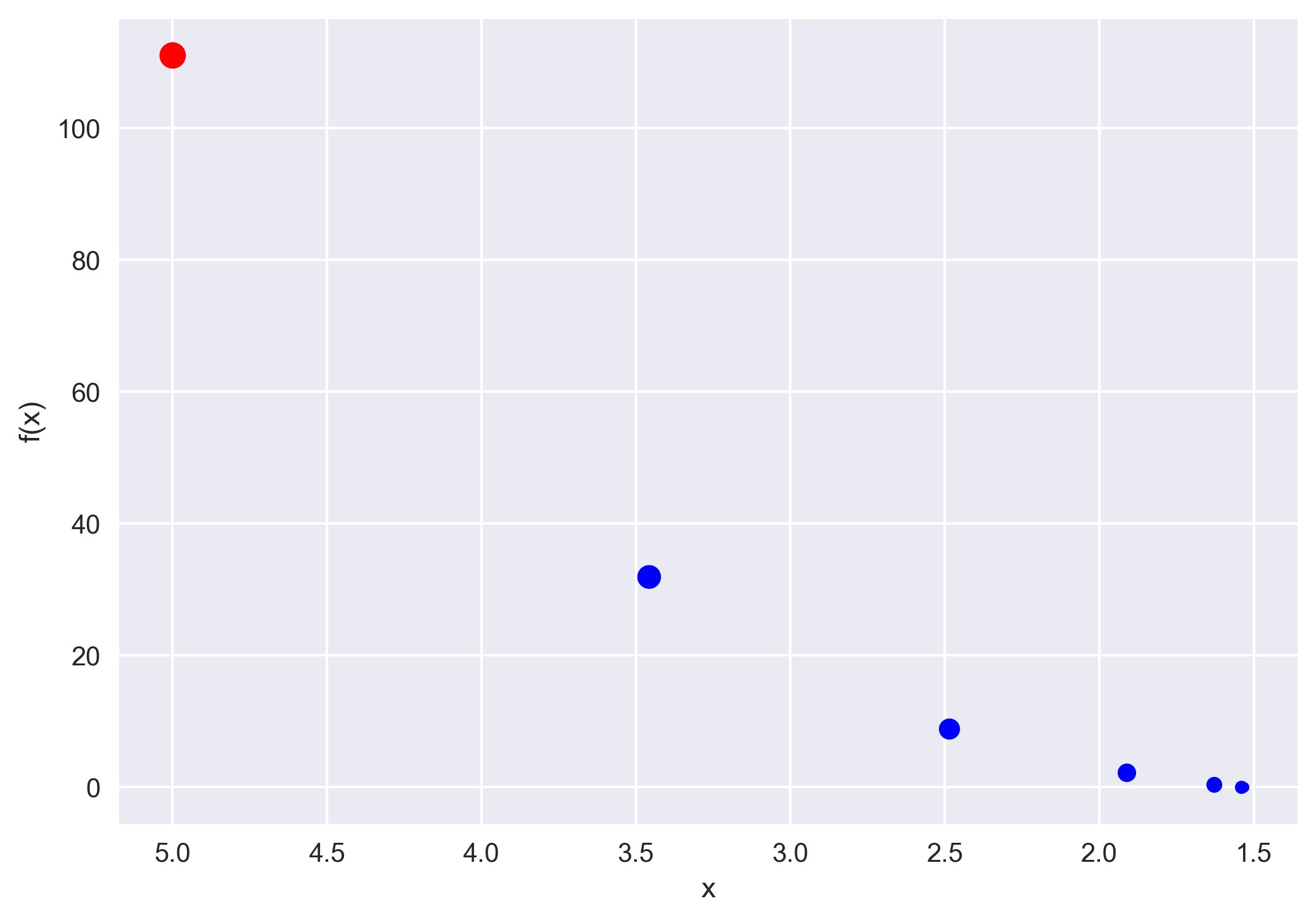
The root of the function is: [1.5320889]
Function value at the root: [4.00197986e-08]
Quick check: Look at the termination criterion if np.abs(func) < 10**-6: break. What is it testing?
Python Example 2
Let us now borrow a function used by Kutz, 2013.
\[f(x) = exp(x) - tan(x) = 0\]The derivative of this function is $f’(x) = exp(x) - sec^2(x)$, which leads to the Newton’s formula:
\[x_{n+1} = x_n - \frac{exp(x_n) - tan(x_n)}{exp(x_n) - sec^2(x_n)}\]import numpy as np
import matplotlib.pyplot as plt
plt.style.use('seaborn')
x = np.zeros((1000, 1))
x[0] = 10.0 # initial guess
fig, ax = plt.subplots(1, 1)
for j in range(1000):
# x_{n+1} = x_n - \frac{exp(x_n) - tan(x_n)}{exp(x_n) - sec^2(x_n)}
x[j+1] = x[j] - (np.exp(x[j]) - np.tan(x[j])) / \
(np.exp(x[j]) - (1/np.cos(x[j]))**2)
# f(x) = exp(x) - tan(x)
func = (np.exp(x[j+1]) - np.tan(x[j+1]))
ax.plot(x[j], func, 'o', color='b')
# termination criteria
if np.abs(func) < 10**-6:
break
plt.gca().invert_xaxis()
ax.set_xlabel('x')
ax.set_ylabel('f(x)')
plt.savefig('example2.png', dpi=300, bbox_inches='tight')
plt.close()
print(f"The root of the function is: {x[j+1]}")
print(f"Function value at the root: {func}")
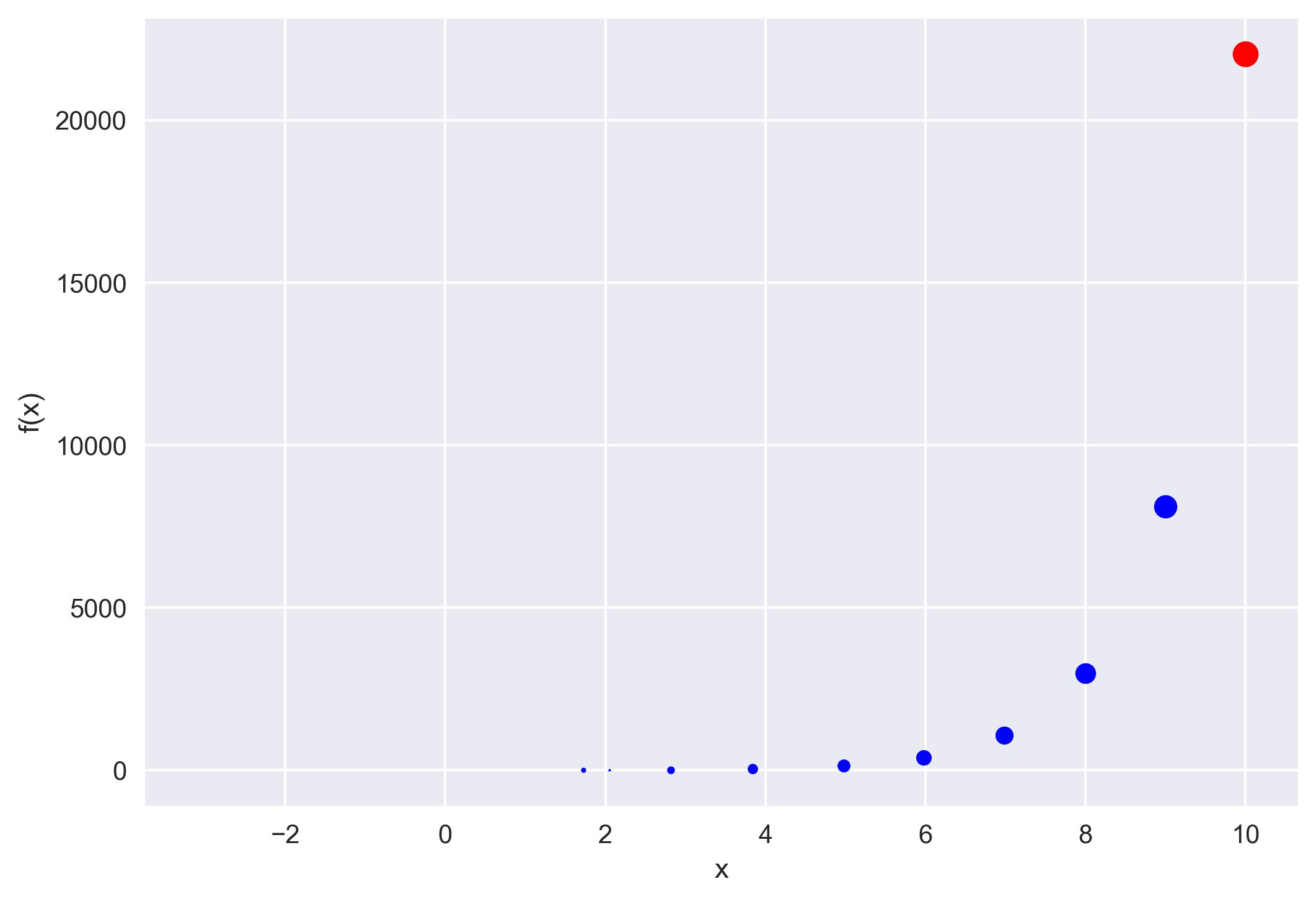
The root of the function is: [-3.0964123]
Function value at the root: [-7.14244983e-11]
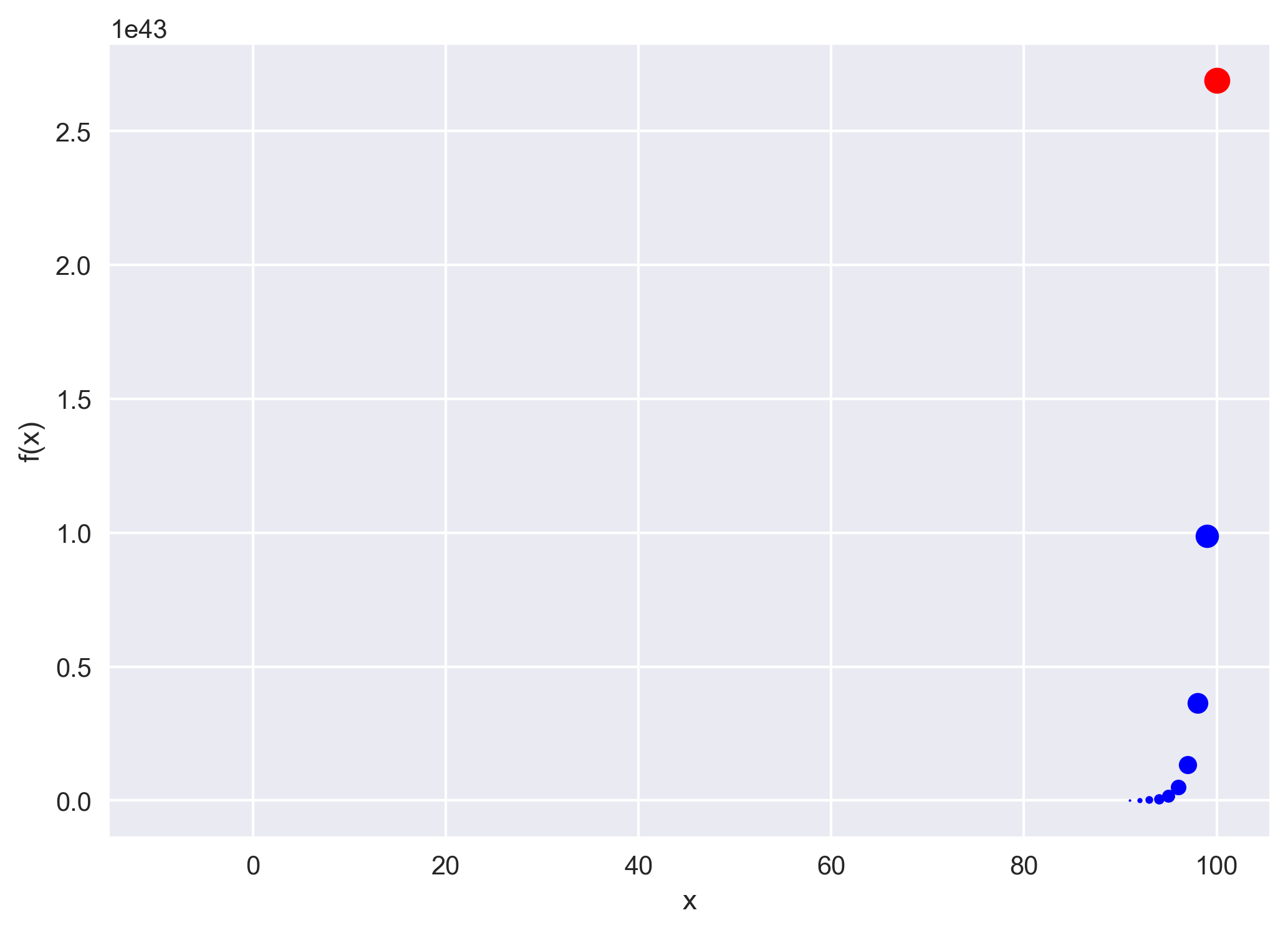
Now, let us run the above code for the initial guess of x[0] = 100.0.
Two practical notes. (1) You rarely need to hand-code this — SciPy’s scipy.optimize.newton does Newton–Raphson when you pass a derivative (fprime), and falls back to the derivative-free secant method when you don’t. The hand-rolled loop here is the best way to understand it. (2) plt.style.use('seaborn') was removed in Matplotlib 3.8 — use plt.style.use('seaborn-v0_8') on a current install.
Conclusions
The Newton’s method is very fast to converge to the solution for a sufficiently close guess. However, if we have a bad guess then it does not converge at all.
Recap
- One step, one tangent. $x_{n+1} = x_n - f(x_n)/f’(x_n)$ follows the tangent at the current guess down to the x-axis.
- Fast — when it works. Near the root, convergence is quadratic (the error roughly squares each step), so only a handful of iterations are needed.
- Two failure modes. It breaks when $f’(x_n) = 0$ (flat tangent, division by zero) and can diverge from a poor initial guess — exactly what the
x[0] = 100.0example shows. -
Stop on a small residual. The loop terminates when $ f(x) $ drops below a tolerance ($10^{-6}$ here), meaning the guess is effectively a root.
Where to go next
scipy.optimize.newtondocs: docs.scipy.org/doc/scipy/reference/generated/scipy.optimize.newton.html- Root-finding in action — the shooting method for BVPs: Solving boundary value problems using the shooting method
- Related iterative schemes: Euler method · Runge–Kutta method
References
- Kutz, J. N. (2013). Data-driven modeling & scientific computation: methods for complex systems & big data. Oxford University Press.
- R. L. Burden and J. D. Faires, Numerical Analysis (Brooks/Cole, 1997).
Disclaimer of liability
The information provided by the Earth Inversion is made available for educational purposes only.
Whilst we endeavor to keep the information up-to-date and correct. Earth Inversion makes no representations or warranties of any kind, express or implied about the completeness, accuracy, reliability, suitability or availability with respect to the website or the information, products, services or related graphics content on the website for any purpose.
UNDER NO CIRCUMSTANCE SHALL WE HAVE ANY LIABILITY TO YOU FOR ANY LOSS OR DAMAGE OF ANY KIND INCURRED AS A RESULT OF THE USE OF THE SITE OR RELIANCE ON ANY INFORMATION PROVIDED ON THE SITE. ANY RELIANCE YOU PLACED ON SUCH MATERIAL IS THEREFORE STRICTLY AT YOUR OWN RISK.
Leave a comment